Food Chain System in Dynamics
Model 1
$$ \begin{align*} \dot{R} =& R \left( 1 - {\frac{ R }{ K }} \right) - {\frac{ x_{c} y_{c} C R }{ R + R_{0} }} \\ \dot{C} =& x_{c} C \left( {\frac{ y_{c} R }{ R + R_{0} }} - 1 \right) - {\frac{ x_{p} y_{p} P C }{ C + C_{0} }} \\ \dot{P} =& x_{p} P \left( {\frac{ y_{p} C }{ C + C_{0} }} - 1 \right) \end{align*} $$
Variables
- $R(t)$: the density of the resource at time $t$.
- $C(t)$: the density of the consumer at time $t$.
- $P(t)$: the density of the predator at time $t$.
Parameters
- $K = 0.94$: the carrying capacity of the resource.
- $x_{c} = 0.4$, $y_{c} = 1.7$, $R_{0} = 0.16129$: quantities related to the consumer’s predation on the resource.
- $y_{p} = 5.0$, $x_{p} = 0.08$, $C_{0} = 0.5$: quantities related to the predator’s predation on the consumer.
Description
The introduced $3$-dimensional food-chain system has the resource following a logistic growth model and can be viewed as two coupled Lotka-Volterra predator-prey models — resource-consumer and consumer-predator — forming a coupled dynamical system.
- An alternative (nearly equivalent) name for this is the Hastings–Powell system.
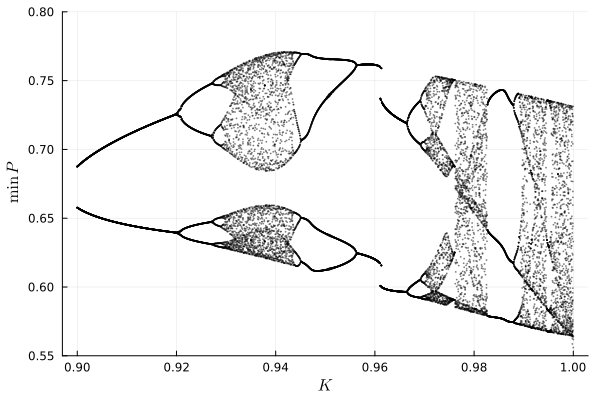
Although systems formed by combining such simple subsystems would ordinarily not be complex, by incorporating a Holling type II functional response between $R-C-P$ it becomes a chaotic system. Indeed, the bifurcation diagram obtained by varying $K, y_{c}, y_{p}$ is as follows.

From a research standpoint, being familiar with such systems can add value to a paper. Another example of a $3$-dimensional chaotic system is the Lorenz attractor, but it is so well-known and widely used that it is not attractive as a benchmark; furthermore, since it can be represented by a polynomial of degree at most $2$, its apparent complexity may be reduced. By contrast, the food-chain system inherently carries ecological meaning, is chaotic, and its equations include rational functions, making it relatively more complex2.
Transient chaos 3 4
Meanwhile, when $x_{c} = 0.4$, $y_{c} = 2.009$, $x_{p} = 0.08$, $y_{p} = 2.876$, $R_{0} = 0.16129$, $C_{0} = 0.5$ are set, in the neighborhood of $K \approx 0.99976$ transient chaos occurs. To draw this bifurcation diagram one should take care to account for transient chaos by repeating simulations for many initial conditions.
The following plot shows that, when $K = 0.99976 + 2\times 10^{-4}$, the distribution of transient lifetimes across varying initial conditions follows an exponential distribution.

Below is the Julia code to reproduce this.
function RK4(f::Function, v::AbstractVector, h=1e-2)
V1 = f(v)
V2 = f(v + (h/2)*V1)
V3 = f(v + (h/2)*V2)
V4 = f(v + h*V3)
return v + (h/6)*(V1 + 2V2 + 2V3 + V4), V1
end
function factory_foodchain2(K::Number; ic = [0., 0.4rand() + 0.6, 0.4rand() + 0.15, 0.5rand() + 0.3], tspan = 0:1e-2:10)
xc, yc, xp, yp, R0, C0 = (
0.4, 2.009, 0.08, 2.876, 0.16129, 0.5)
function sys(v::AbstractVector)
_,R,C,P = v
dt = 1
dR = R*(1 - frac(R,K)) - xc*yc*frac(C*R, R + R0)
dC = xc*C*(frac(yc*R, R + R0) - 1) - xp*yp*frac(P*C, C + C0)
dP = xp*P*(frac(yp*C, C + C0) - 1)
return [dt, dR, dC, dP]
end
len_t_ = length(tspan); h = tspan.step.hi
v = ic; DIM = length(v)
traj = zeros(2+len_t_, 2DIM); traj[1, 1:DIM] = v
tk = 0
while tk ≤ len_t_
t,_,_,_ = v
v, dv = RK4(sys, v, h)
if t ≥ first(tspan)
tk += 1
traj[tk+1, 1:DIM ] = v
traj[tk , DIM .+ (1:DIM)] = dv
end
end
return traj[1:(end-2), :]
end
factory_foodchain2(T::Type, args...; kargs...) =
DataFrame(factory_foodchain2(args...; kargs...), ["t", "R", "C", "P", "dt", "dR", "dC", "dP"])[:, Not(:dt)]
hrzn = []
vrtl = []
@time for k in 0.9:0.0001:1
for _ in 1:500
traj = factory_foodchain2(DataFrame, k, tspan = 0:1e-1:5000)[40000:end,:]
bits = arglmin(traj.P)
if maximum(traj.P) > 0.55
push!(hrzn, fill(k, length(bits)))
push!(vrtl, traj.P[bits])
break
else
println("k: $k should be tried again")
end
end
end
using LaTeXStrings
scatter([hrzn...;], [vrtl...;], ylims = [0.55, 0.8], yticks = 0.55:0.05:0.8, xticks = 0.9:0.02:1,
ms = 1, msw = 0, color = :black, alpha = 0.5, legend = :none, xlabel = L"K", ylabel = L"\min P")
png("bifurcaiton.png")
tau_ = zeros(Int64, 100000)
@showprogress @threads for k in eachindex(tau_)
traj = factory_foodchain2(DataFrame, 0.99976 + 2e-4, ic = rand(4), tspan = 0:1e-0:5000)
tau = findlast(diff(cumsum(traj.P .< 0.55)) .== 0)
tau_[k] = !isnothing(tau) ? tau : -1
end
freq = [count(x .≤ tau_ .< x + 250) for x in 250:250:4750]
scatter(250:250:4750, freq ./ sum(freq), yscale = :log10, xticks = 0:1000:5000, xlims = [0, 5000], yticks = [1e-1, 1e-2], color = :white, legend = :none, xlabel = "transient lifetime", ylabel = "frequency")
Zhai, Z. M., Moradi, M., Glaz, B., Haile, M., & Lai, Y. C. (2024). Machine-learning parameter tracking with partial state observation. Physical Review Research, 6(1), 013196. https://doi.org/10.1103/PhysRevResearch.6.013196 ↩︎
Moradi, M., Panahi, S., Bollt, E. M., & Lai, Y. C. (2024). Data-driven model discovery with Kolmogorov-Arnold networks. arXiv preprint arXiv:2409.15167. https://doi.org/10.48550/arXiv.2409.15167 ↩︎
Kong, L. W., Fan, H. W., Grebogi, C., & Lai, Y. C. (2021). Machine learning prediction of critical transition and system collapse. Physical Review Research, 3(1), 013090. https://doi.org/10.1103/PhysRevResearch.3.013090 ↩︎
https://github.com/Zheng-Meng/Dynamics-Reconstruction-ML/blob/main/response/foodchain_parameter_change.py ↩︎